3 Hyperbolic Groups
This section recounts the basic concepts of geometric group theory. We also discuss the Dehn algorithm for solving the word problem in hyperbolic groups; this problem exemplifies the implications of hyperbolicity and helps us compute the Cayley graphs of known hyperbolic groups.
References:
- Geometric Group Theory: an Introduction (Löh 2017).
- Chapter 5: Quasi-isometries.
- Chapter 7: Geodesics and hyperbolicity.
- Chapter 8: Gromov boundaries.
- Appendix A3: hyperbolic Riemmanian geometry (quite detailed introductory treatment).
- Hyperbolicity and the Word Problem.
Main takeaways:
- Quasi-properties are only sensitive to behaviors on a large (but uniform) scale.
- Quasi-isometric invariance apply to Cayley graphs (up to changes in generating sets) and hyperbolicity.
- One key property of hyperbolic spaces is that local geodesics are close to global geodesics (lemma 3.3), which implies the contractability of loops in Cayley graphs and the Dehn presentation.
Geometric definitions
We first define quasi-properties, then proceed to apply the quasi-definitions to geodesics and hyperbolicity.
Definition 3.1 (quasi-isometry)
- A map \(\phi:(X, d)\to X(X', d')\) is a \((\alpha_{\geq 1}, \beta_{\geq 0})\)-quasi-isometric embedding if \(\forall x, y\in X\): \[ \dfrac 1 {\alpha} d(x, y) - \beta \leq d'(\phi(x), \phi(y)) \leq \alpha d(x, y) + \beta \]
- \(\phi\) is a quasi-isometry if, additionally, the expanded image of \(\phi(X)\) covers \(X'\) up to some uniform bound, i.e. \(\exists k_3\geq 0\) such that \[ \forall y\in X', \exists x\in X: d'(y, \phi(x)) \leq k_3 \]
Caveat: quasi-isometries are not bijective in general, e.g. \(\mathbb Z\) is quasi-isometric to \(\mathbb R\).
Definition 3.2 (geodesics and hyperbolic spaces) Fixing a metric space \((M, d)\):
- A geodesic is an isometric embedding \(\gamma:I\to M\), i.e. \[ \forall a, b\in I: d(\gamma(a), \gamma(b)) = |a-b| \tag{3.1} \]
- A \((\alpha, \beta)\) quasi-geodesic is a \((\alpha, \beta)\)-quasi-isometric embedding \(I\to M\).
- A \(k\)-local geodesic is a path \(\gamma:I\to M\) such that (3.1) holds for all \(a, b\in I\) with \(|a-b|\leq k\).
- A metric space \((M, d)\) is a geodesic space if any two points are connected by a geodesic. Quasi-geodesic spaces are defined analogously.
- A geodesic metric space is \(\eta\)-hyperbolic if for any geodesic triangle \([a, b], [b, c], [a, c]\), every edge is contained in the \(\eta\)-neighborhood of the other two edges. The space is hyperbolic if it is \(\eta\)-hyperbolic for some \(\eta\geq 0\).
Geodesics in the differential geometric sense are more analogous to “local geodesics” in the definitions above.
Definition 3.3 (Cayley graph) Given a group \(G\) and a generating set \(S\), the Cayley graph \(\Delta(G, S)\) of \(G\) w.r.t \(S\) is the undirected graph defined by
- Vertices denoting elements of \(G\), and
- Edges given by \(\{(g, gs): g\in G, s\in S\cup S^{-1}-\{1\}\}\).
Each Cayley graph is endowed with the natural word metric, with each edge having unit length.
Definition 3.4 (hyperbolic group) A finitely generated group \(G\) is hyperbolic if the Cayley graph of \(G\) with the word metric is a hyperbolic space.
We also quote the following results, which state that hyperbolicity and Cayley graphs are quasi-isometric invariants.
Lemma 3.1 ((Löh 2017), prop. 5.2.5) Given finite generating sets \(S, S'\) for a group \(G\), there exists a quasi-isometry from \(\Delta(G, S)\) to \(\Delta(G, S')\) and vice versa.
Lemma 3.2 ((Löh 2017), corollary 7.2.13) Given two quasi-isometric geodesic spaces \(X, X'\), \(X\) is hyperbolic iff \(X'\) is.
Quasi-geodesics in hyperbolic spaces
This section recounts in greater detail (Löh 2017), section 7.2. We feel that this is necessary to
- Obtain concrete intuition for how hyperbolicity imply the relation between local and global structures.
- Understand the Dehn algorithm for solving the word problem, needed for plotting Cayley graphs.
Lemma 3.3 (local geodesic approximation) In an \(\eta\)-hyperbolic space \(X\), for every \(k_{>8\eta}\)-local geodesic \(\gamma:[0, L]\to X\) and geodesic \(\gamma:[0, L']\to X\) with the same endpoints, the image \(\mathrm{im}\, \gamma\) is contained in the \(2\eta\)-neighborhood of \(\mathrm{im}\, \gamma'\).
Proof: Pick a point \(x=\gamma(t)\) at maximal distance from \(\gamma'\).
- First suppose \(t, L-t > 4\eta\). By \(k_{>8\eta}\) local-geodesic condition,
pick a subarc of length in \((8\eta, k)\) with endpoints \(y, z\in \mathrm{im}\, \gamma\) and midpoint \(x\).
- Let \(y', z'\) be the closest points on \(\gamma'\) to \(y, z\), respectively.
- Then \([y, z]\) (a subarc of \(\gamma\) through \(x\)), \([y, y']\), and \([z, y']\) form a geodesic triangle.
- By \(\eta\)-hyperbolic condition, there exists \(w\) on \([y, y']\) or \([y', z]\) such that \(d(w, x)<\eta\).
- Claim: \(w\) cannot exist on \([y, y']\) (so must be on \([y', z]\)), else this contradicts the maximality of \(x\):
- Since \(L([y, x])>4\eta\) and \(L([w, x])<\eta\), by the triangle inequality, \[ L([y, w]) > 3\eta > L([w, x]) \] This implies that \(d(x, y') < d(y, y')\). Combined with the extremality of \(y'\) w.r.t. \(y\), we contradict the construction of \(x\) by \[ d(x, \gamma') < d(x, y') < d(y, y') = d(y, \gamma') \]
- Again, \([y', z], [y', z'], [z, z']\) form a geodesic triangle, and by \(\eta\)-hyperbolic condition,
there exists \(w'\) on \([z, z']\cup [y', z']\) such that \(d(w', w)<\eta\).
- Claim: \(w'\) cannot exist on \([z, z']\), else contradicting the maximality of \(x\):
- Assuming by contradiction, \(d(x, w') \leq d(x, w) + d(w, w') < 2\eta\), then \[ d(z, w') \geq d(x, z)_{>4\eta} - d(x, w')_{<2\eta} > 2\eta > d(x, w') \implies d(x, z') < d(z, z') \] Then \(d(x, \gamma) \leq d(x, z') < d(z, z') = d(z, \gamma)\), contradicting the maximality of \(x\).
- Combining the two results, we obtain \(d(x, \gamma) < 2\eta\).
- For one of \(t, L-t < 4\eta\), assume w.l.o.g. that \(t<4\eta\) and apply the same construction to the geodesic triangle \([\gamma_0, z, z']\).
- For the trivial case \(t, L-t < 4\eta\), \(\gamma\) is a geodesic.
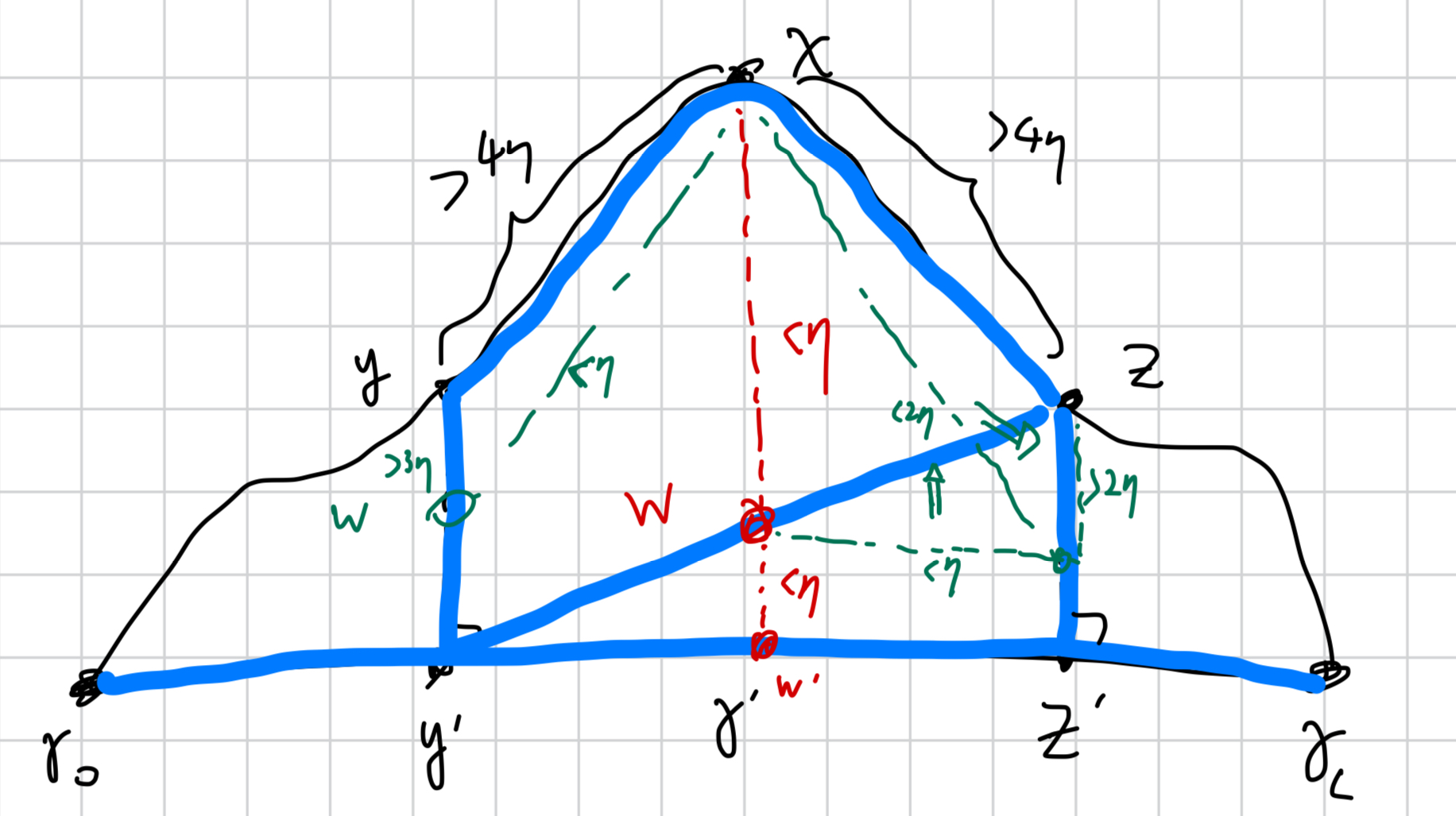
Figure 3.1: Hypothetical (for contradiction) constructions are in green. Geodesics are in blue.
Dehn algorithm
This part follows section 7.4.1, which efficiently solves the word problem for hyperbolic groups. The main idea of the proof is as follows:
- By lemma 3.3, local geodesics are close to global geodesics.
- This implies the shortcut lemma 3.4, which means that every loop in the Cayley graph (which is piecewise geodesic) of a hyperbolic group contains a geodesic shortcut.
- Null-homotopic words correspond to loops in the Cayley graph, and Dehn relations correspond
to rules with which to “shrink” the loops.
- The shortcut lemma implies the existence of a Dehn presentation in which loops can always be shrunk to a smaller loops.
Definition 3.5 (Dehn presentation) A finite presentation \(\langle S|R\rangle\) is a Dehn presentation if there exists words \((u_1, v_1), \dots, (u_n, v_n)\in (S\cup S^{-1})^*\) such that
- \(R = \{u_1 v_1^{-1}, \dots, u_n v_n^{-1}\}\).
- For all \(j\), \(|v_j| \leq |u_j|\).
- For all nontrivial null-homotopic words \(w\in (S\cup S^{-1})^*\), some \(u_j\) is a subword of \(w\).
Note that \(v_j\) can be null. For example, the free group of rank \(2\) has Dehn representation \(v_1=\dots=v_4=1\), and \[ u_1 = xx^{-1}, \quad u_2=x^{-1}x, \quad u_3=yy^{-1}, \quad u_4=y^{-1}y \]
Given a Dehn presentation, the word problem is solvable in time \(O(|w|)\) by a replacement algorithm.
Lemma 3.4 (shortcuts in cycles in hyperbolic groups) Given an \(\eta\)-hyperbolic group \(G\), a finite generating set \(S\) and \(\Delta(G, S)\) being \(\eta\)-hyperbolic, if \(\gamma:[0, n]\to \Delta(N, G)\) is a piecewise-geodesic cycle (of length \(n\)), then there exists a restriction \(\gamma_{[t, t']}\) with \(t, t'\in [0, n]\) such that \[ L(\gamma_{[t, t']}) \leq 8\eta \] and such that \(\gamma_{|[t, t']}\) is not geodesic.
Proof: The lemma equivalently claims that there is no \(c_{>8\eta}\)-local geodesic cycle, and we argue by contradiction. Since \(\gamma\) is a loop, we first have \(n>8\eta\). By lemma 3.3, \(\gamma\) is \(2\eta\)-close to the trivial geodesic at \(\gamma_0\), so \(\mathrm{im}\, \gamma\) is in the \(2\eta\)-ball centered at \(\gamma_0\). Then we obtain the following contradiction (the last equality follows by the local geodesic condition): \[ 4\eta \geq \mathrm{diam}\, B_{2\delta}(\gamma_0) \geq d(\gamma_0, \gamma_{5\eta}) = 5\eta \] Note that the \(8\eta\) here is inherited from lemma 3.3.
Theorem 3.1 (Dehn presentations and hyperbolic groups) Given a hyperbolic group \(G\) and a finite generating set \(S\), there exists a finite set \(R\subset (S\cup S^{-1})^*\) such that \(\langle S|R\rangle\) is a Dehn presentation of \(G\).
Proof: Consider the canonical presentation \(\pi:F(S)\to G\). Using the shortcut lemma, consider the finite set \[ R = \left\{ uv^{-1} \,|\, u, v\in (S\cup S^{-1})^*: d(1, \pi(u)) < |u| \leq \lceil 8\eta\rceil + 2, \,\, |v|=d(1, \pi(u)), \,\,\pi(u)=\pi(v) \right\} \tag{3.2} \] The interpretation for each constraint are:
- \(|v|=d_s(1, \pi(u))\): \(v\) is the geodesic connecting the identity to \(u\), i.e. the word \(v\) is the “canonical word” representing \(u\).
- \(\pi(u)=\pi(v)\): the geometric realization of \(uv^{-1}\) forms a loop.
The canonical isomorphism \(\pi/\langle R\rangle^{\unlhd}:\langle S|R\rangle\to G\) is surjective by the \(\pi(u)=\pi(v)\) constraint, and we next argue that it is injective, i.e. every null-homotopic word satisfies \(w\in \langle R\rangle^{\unlhd}\). This can be argued inductively by applying the shortcut lemma:
- If \(w\) contains a subword \(ss^{-1}\), then \((ss^{-1})1\in R\). Remove \(ss^{-1}\) by conjugating \(w=a(ss^{-1})b\) with \(a(s^{-1}s)a^{-1}\) and apply the inductive hypothesis.
- If \(w\) contains no subword of the form \(ww^{-1}\), then \(w\) realizes a cycle; apply the shortcut lemma to obtain \(w=w'uw''\) and replace \(u\mapsto v\) by conjugation, the apply the inductive hypothesis.
Gromov-boundaries
This section discusses the relevant results in Chapter 8 of (Löh 2017). Intuitively, the definition of boundary should satisfy:
- To every metric space \(X\) a (preferably compact) topological space \(X_\infty\).
- Quasi-isometric invariance: \(X\) is quasi-isometric to \(X'\iff X_\infty\) is homeomorphic to \(X'_\infty\).
- Functoriality: a quasi-isometric embedding \(X\to Y\) induces a continuous map \(X_\infty\to Y_\infty\) compatible with composition: \((g\circ f)_\infty = g_\infty\circ f_\infty\), for \(f, g\) quasi-isometric embeddings.
The main idea is to define points on the boundary as equivalence classes of geodesic rays.
Definition 3.6 (Gromov boundary) Two quasi-geodesic rays \(\gamma, \gamma':[0, \infty)\to X\) are equivalent if they have finite Hausdorff distance, i.e. \(\exists c>0\) such that \[ \mathrm{im}\, \gamma \subset B_c(\mathrm{im}\, \gamma'), \quad \mathrm{im}\, \gamma' \subset B_c(\mathrm{im}\, \gamma) \] The Gromov boundary is defined as the set of quasi-geodesic rays modulo \(\sim\) above, with the topology defined as follows:
- Given \((x_n), x\subset \partial X\), we say \(x_n\to x\) if there exists representative rays \((\gamma_n), \gamma\) such that every subsequence of \((\gamma_n)\) contains a subsequence which converges to \(\gamma\) uniformly on compact subsets of \([0, \infty)\).
Importantly, the Gromov boundary of \(\mathbb H^n\) is \(S^{n-1}\) ((Löh 2017), Example 8.3.5).
Theorem 3.2 (quasi-isometric invariance of Gromov boundary) For two geodesic metric spaces \(X, X'\), we have \(\partial X\cong \partial X'\iff X, X'\) are quasi-isometric to one another.
The immediate implications of this result are as follows:
- The Gromov boundaries of hyperbolic groups are well-defined as the Gromov boundaries of their Cayley graphs, regardless of the generating sets.
- Groups which are quasi-isometric to \(\mathbb H^3\) have Gromov boundary \(S^2\).
Quasi-isometry of Cayley Graphs
Proposition 3.1 (Loh (5.2.5)) Given \(G\) finitely generated by \(S, S'\), the identity map \(1_G\) is a bilipschitz equivalence between \((G, d_S)\) and \((G, d_{S'})\).
Proof: Define \(c=\max_{s\in S\cup S^{-1}} d_{S'}(1, s)\). Note that the distance is in \(s'\). Using the left-invariance of the metric, for arbitrary \(g, h\in G\), let \(g^{-1}h = s_1\dots s_n\) in \(S\cup S^{-1}\) be the geodesic connecting \(g, h\), then \[\begin{align} d_{S'}(g, h) &= d_{S'}(g, gs_1\dots s_n) \leq d_{S'}(g, gs_1) + d_{S'}(gs_1, gs_1s_2) + \dots \\ &= d_{S'}(1, s_1) + \dots + d_{S'}(1, s_n) \leq cn = cd_S(g, h) \end{align}\]
Interesting Misc
The Gromov boundary of free groups (of nontrivial rank) are Cantor sets, which is not homeomorphic to \(S^1\). Since Gromov boundary is a quasi-isometric invariant, it follows that nontrivial free groups are not quasi-isometric to the hyperbolic space \(\mathbb H^2\).
This can be seen intuitively by the fact that the the “leaves” of a tree are not translationally homogeneous: radial geodesics which diverge at an earlier root differ from those which diverge at a later root, even if the two pairs can have the same angular separation.